The research topic of the System Dynamics Laboratory focuses on the control of structural vibration, studies on mechanical properties of structures and materials, the design and analysis of mechatronic-microsystems, and the integration of precision machinery and mechatronics. Main research themes include,
精密定位平台設計與控制 Design and Control of Precision Positioning Stage
橡膠軸承力學與精密定位平台設計 Mechanical Properties Testing of Rubber Bearings
機電系統動態分析與精密機械定位與振動控制 System Dynamic Analysis and Vibration Control
雷射玻璃切割最佳化研究 Laser Glass Peeling: Optimization of Laser Cutting Processing


新型橡膠軸承一維定位平台
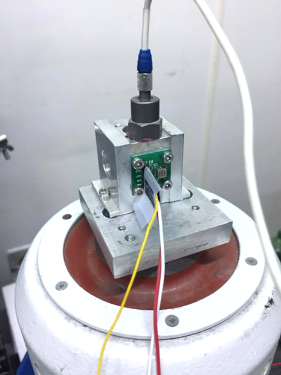
工具機用加速規原型 (開發中)
簡介 Introduction: 精密定位在學術界與產業界是一項受到重視的關鍵技術之一,使精密定位技術在相關儀器上的應用更被重視。例如學術界為了研究奈米材料而大量使用掃瞄探針式顯微鏡、掃描式電子顯微鏡或是穿透式電子顯微鏡等,精密定位平台被應用在微調試片的位置,或是搭配振動控制技術來隔離環境影響。產業界在研發主動振動控制技術時常搭配使用精密定位平台,將其應用在精密設備上。參與研究的學生經由此類研究亦可同時學習到理論建模、數值分析、系統實現、結構測試,以及電控量測等。
本實驗室的主要成果是以撓性機構 (compliant mechanism) 為出發,設計多自由度以及高精度的精密定位平台,以作為精密量測或是自動化光學檢測之重要關鍵組件。平台實現後,以回授控制的方式進行平台之精密定位與操控。本實驗室研究所提出之堆疊式壓電致動設計具有簡單拓展自由度的特點,目前定位精度可達20 奈米,行程可達 150 微米,頻寬可達 200 Hz 以上,預期隨者控制系統之改進,性能尚可進一步提升。
此外,金屬撓性平台傳統上使用線切割加工製作,雖然以此方式加工得到性能上良好的表現,但仍有兩個問題需解決:一是無法達成輕量化的設計,二是使用的材料多為低阻尼材料,如此一來成為撓性定位平台亟需改善之目標。鑒於上述之問題,本實驗室亦引入3D列印製作較複雜的幾何外型來達到撓性定位平台之輕量化。並且為了加強平台的動態表現,引入剪力阻尼的減振策略,對撓性平台之重點部位設計孔隙流道填入橡膠材料,達到提升材料阻尼之性能。初步實驗結果顯示此為有效之設計,可增加一倍以上之結構阻尼。此研究仍在持續進行中。
同時,本實驗室亦致力於發展工具機使用之低成本高頻寬加速規,預期將會整合至五軸加工機上進行相關的測試與狀態監控研究。在此研究主題上,本實驗室與南台科技大學劉雲輝教授合作,以設計整合微機電加速規的方式,並透過必要之訊號放大與濾波,將微機電加速規的低成本特性充分展現。因為考量不同頻段的需求,也在此提出整合多棵不同特性微機電加速規為一模組之構想,並進行可行性評估。此研究仍在持續之中,目前之靈敏度可達 200 mV/g, -3dB,頻寬可達 7kHz。
本實驗室相關研究 Related Thesis Studies:
結合撓性結構與橡膠軸承之單軸粗細定位平台之設計、分析與解耦合控制(李昱慶, 2017)
新型三軸橡膠軸承定位平台之分析、設計與控制(陳昱丞, 2017)
結合3D列印與剪力阻尼於撓性定位平台之設計與控制(游逸萱, 2016);
新型橡膠軸承一維定位平台之分析、設計、控制(鄧諺舉, 2015);
堆疊式壓電雙軸精密定位平台之設計、分析與控制(李哲維, 2012)
合作團隊 Cooperated with: 劉雲輝 教授(南台科技大學)
簡介 Introduction: 橡膠軸承在受壓縮方向之剛性,遠大於剪切方向的剛性,此異相性的特性被廣泛運用在建築防震上,近來更被引進精密機械領域,用於取代傳統的撓性機構。本實驗室發展一套合適的材料測試系統,針對橡膠軸承在特定環境做性質檢測。
此研究之構想係在陳國聲教授於2011年於麻省理工學院訪問時,與 hosting之 David L. Trumper 教授討論數個月後形成。Trumper 教授研究群率先將橡膠軸承應用於精密機械,也設計了一個測試系統與數個應用載具;然而,據陳國聲教授個人實際使用與將其修護後的經驗,應用載具的性能受到橡膠軸承的力學性質影響甚大,在材料測試無法有效獲取資訊下,此結果也反映到應用載具之性能與原始設計存有相當的差距。基於以上,本實驗室發展了一測試系統,引入更多對複雜的橡膠力學問題的探索,解決此根本上之設計問題,如此方可在精密機械設計與控制上突破。在此領域之中,測試系統建立、力學分析、橡膠軸承精密定位應用為其三大主軸,分別建立音圈區動之測試平台、精密定位系統,以及利用超彈有限元素分析建立軸承之本構方程。
本實驗室相關研究 Related Thesis Studies:
新型三軸橡膠軸承定位平台之分析、設計與控制(陳昱丞, 2017)
彈性結構破壞之有限元素分析與其應用實例探討(洪榮燦, 2016);
新式雙軸材料測試系統之實現與橡膠壓縮、剪力、疲勞測試(鄭晏峰, 2016);
新型橡膠軸承一維定位平台之分析、設計、控制(鄧諺舉, 2015);
雙軸式材料測試系統之設計與實現及其在橡膠軸承之應用(林佩君, 2014)
合作團隊 Cooperated with: 屈子正 教授
聯絡資訊 Contact: 陳世春 同學(碩108).

雙軸式材料測試系統平台

精密機械減振控制之測試平台
簡介 Introduction: 靜電或電磁致動器之力參數的精確與否,關係著機電元件控制效果之優劣。基於電磁力與靜電吸引力在數學上互為類比的特性,我們試圖發展以磁浮系統為主之巨觀測試平台,用以對微機電系統控制的研究,進行實驗驗證。 除此之外,我們也將微機電 Pull-In 不穩定現象與磁浮致動器結合,並提出一個快速有效的電磁鐵校準方法,對於以磁浮致動為主之精密機械系統有相當的貢獻。未來更將以此為基礎,對微機電系統動態分析與控制做更深入之研究。
另外,在機電整合運動系統上,殘留振動的存在,影響了撓性機件運動之精密定位,增加了達成工作目標所需要的時間;而輸入修正法,提供了一個有效且快速的減振方法。但傳統的輸入修正法,大多應用於線性結構系統,對於具非線性特性之機電系統,如含幾何非線性之電磁制動系統,則顯得無法勝任,而僅能依靠試誤的方式進行設計,缺乏一嚴謹的設計依據。本實驗室於相空間下,分別以機械能守恆與力平衡的觀點來分析非線性系統,發展了非線性輸入修正法,並成功的將其運用於電磁制動之撓性結構上,並以實驗驗證之。本實驗室研究提出的方法可完全涵蓋過去線性設計之結果,並對於擴展輸入修正法之 scope 與其應用範圍有重要的貢獻。
本實驗室相關研究 Related Thesis Studies:
直接加速度回授與加速度積分回授於堆疊式雙軸撓性定位平台上之振動控制(林洺安, 2016);
加速度回授於撓性結構之振動控制(呂毓笙, 2014);
堆疊式壓電雙軸精密定位平台之設計、分析與控制(李哲維, 2012)
聯絡資訊 Contact: 楊承穎 同學(碩107).
簡介 Introduction: 室內定位技術對於智慧生活空間之機器人發展為重要研究議題之一。機器人於地形複雜的室內環境中執行任務,除了不可或缺的自主移動能力,定位環境能讓機器人得知各自位置,有效提升工作效率與可靠度。本實驗室為提升移動載具於室內定位環境的操作可靠度,透過空間3D飛行載具與平面2D輪型載具的群體合作,發展群體移動載具於室內Wiimote 3D定位環境之定位與運動控制,展示多類型機器人能不受限於室內環境地形提供更多的服務內容。未來能進一步增加載具本身之感測設備,實踐更多與人們互動之功能,大幅提升載具的工作效能。
將感測器與致動器模組導入建築物,使空間具有感應、彈性、與互動性,能因應天氣與居住者的需求與行為,自動產生空間的變形,顛覆傳統上對於建築空間的概念。本實驗室研究開創智慧化居住空間前瞻性的概念設計實驗,將空間視為一個巨大的機器人,每一個空間體,由數百個小型模組化的機器人組合而成,為了落實機器建築的實驗,本實驗室與相關聚焦於空間牆體的動態單元實驗,將感測器與致動器結合到空間牆體的設計,研發建築空間中自走變形以及利用太陽光儲能照明的機器人,幾組趴趴走的空間機器人將組合成一機器建築,使牆面可依照使用者需求動態變形、流動、發光與呼吸。換句話說,互動式空間牆面主要功能為調節內部環境以及空間彈性使用,一組可回應環境的智慧型表層單元,可感知環境與使用者的狀態,改變自身型態或移動位置來滿足使用者的需求,建構出符合綠色概念的智慧建築。本研究主要整合機電與傳統建築,試圖提升建築層次,以融入目前之綠色環保以及 E-life 之中。本研究題材創新,整合不同背景領域,提出有效的下一世代智慧建築之概念。目前初步研究成果在國內外創意設計發明大賽中,均獲得很高的評價(如東元綠色科技競賽、麗偉創意競賽、韓國首爾國際發明大賽金牌、意法國際半導體校園創意競賽等)。
而其衍生之技術在這幾年也被我們成功地運用在市內機器人定位、操控,以及任務規劃的相關研究。本實驗室利用此技術成功的結合室內移動式機器人進行導航相關研究,對於智慧生活的實現有相當的貢獻。
本實驗室相關研究 Related Thesis Studies:
結合Wiimote與智慧地板之室內定位系統感測於移動載具之技術發展與應用(鄭中豪, 2017);
Wiimote 3D定位系統之發展與其在室內移動機器人之姿態追蹤應用(李庭豪, 2015);
結合Wiimote感測於室內移動載具之技術發展與應用:移動定位、路徑演算、及人機整合(傅育德, 2013)

Wiimote 空間機器人定位模組


全向輪與四軸飛行器
不同時期的典型XFEM裂縫擴展模擬結果
簡介 Introduction: 超薄玻璃為3C裝置顯示元件之重要子系統,其切割品質直接影響成本與系統可靠度,而表面缺陷的移除更是關係到玻璃抗破壞負載的能力。本研究主要探討雷射 (CO2, Pico-second, Femto–second 等各種雷射) 加工玻璃時之破片與表面品質控制問題。
最早於2005年,在工研院機械所之支持下,本實驗室與本系鍾震桂教授,楊天祥教授組成團隊,探討水輔助雷射玻璃加工之技術發展、力學行為,以及與環境之 interaction 等;本實驗室在該計畫中負責執行熱切削之熱應力與破裂分析與防治。另外在工研院南分院支持下,於 2012年本實驗室與本系楊天祥教授、屈子正教授與溫昌達教授合作,探索超薄玻璃表面剝離機制。以拓展型有限元素法 (extended finite element method, XFEM) 為工具,探索裂紋成長狀況,並提出工程方法藉以提升製程良率。成功的解釋與改進該方法的一些盲點。其成果代表台灣參與美國 R&D 100 之評選,最後入圍決選,雖未在最後100名內獲獎,仍可看出其結果之成功。此研究目前仍在延續,且更進一步,探索曲面加工玻璃之完整性問題,這對於一些封閉路徑之孔洞加工有著非常關鍵的影響,且會對3C 顯示系統之製作更有效率與提升成本競爭力。
本實驗室相關研究 Related Thesis Studies:
彈性結構破壞之有限元素分析與其應用實例探討(洪榮燦, 2016);
彈性結構的有限元素破壞分析與微系統工程之應用(林琬儒, 2012)
合作團隊 Cooperated with: 楊天祥 教授、屈子正 教授、溫昌達 教授
聯絡資訊 Contact: 楊承穎 同學(碩107).

計畫主持人,2018-01-01 → 至今(預計 2018-12-31)
參與人員 Members: 楊承穎(碩107)
關鍵字 Keywords: 晶片打線接合 (wire bonding)
計畫經費 Funding: 600K
補助單位 Sponsored by: 日月光公司
共同主持人(計畫主持人:黃聖杰 教授),2016-08-01 → 至今(預計 2019-07-31)
參與人員 Members: 蔡瑞敏(碩107)、孫翊淳(碩108)、陳璿文、李庭豪
關鍵字 Keywords: 定向性能量沉積技術(directed energy deposition, DED); 訊息物理融合系統(cyber-physical system, CPS); 工具機監控 (tools machine monitoring)
補助單位 Sponsored by: 科技部
相關連結 Links: 工具機監控與壽命分析之CPS技術開發-以DED複合機台為例 (I) (成大機構典藏)
共同主持人(計畫主持人:屈子正 教授),2017-08-01 → 至今(預計 2018-07-31)
參與人員 Members: 陳世春(碩108)、詹惠媛(大學部106)
關鍵字 Keywords: 選擇性雷射熔融 (selective laser melting, SLM); 積層製造 (additive manufacturing); 金屬粉末 (metal powder); 最佳化分析 (optimization); 田口式實驗法 (Taguchi method); 熱流分析 (thermal-fluid analysis); 機械強度 (strength); 機械模數 (modulus); 熱膨脹係數 (coefficient of thermal expansion); 殘留應力 (residual stress); 翹曲 (warpage); 粘塑性模型 (viscoplastic model)
補助單位 Sponsored by: 科技部
相關連結 Links: 金屬粉末雷射熔融積層製程參數模擬最佳化分析 (I) (成大機構典藏)
計畫主持人,2017-08-01 → 至今(預計 2018-07-31)
關鍵字 Keywords: 半導體製程 (semiconductor fabrication);多層薄膜 (multi-layered films);有限元素分析 (finite element analysis);機械性質檢測 (mechanical characterization);結構可靠度 (structural integrity);奈米壓痕 (nanoindentation);介面接合強度 (interfacial strength)
補助單位 Sponsored by: 科技部
相關連結 Links: 半導體後段製程薄膜結構機械性質檢測與結構性能表現之分析設計 (成大機構典藏)
計畫主持人,2017-08-01 → 至今(預計 2018-07-31)
參與人員 Members: 潘思辰(碩108)
關鍵字 Keywords: 橡膠軸承 (elastomeric bearings);平台設計 (stage design);黏彈結構 (viscoelasticity);有限元素分析 (finite element analysis);精密定位 (precision positioning);控制整合 (control integration)
補助單位 Sponsored by: 科技部
相關連結 Links: 橡膠軸承結構精密定位平台設計, 控制, 與其在精密檢測之應用研究 (成大機構典藏)